Site Search

As a system manipulator, it is generally composed of three parts and six sub-systems. These three parts are the mechanical part, the sensor part, and the control part. The perception part includes the perception system and the manipulator---environmental interaction system.
1. The perception system of the basic composition of the manipulator
The perception system is composed of internal sensor modules and external sensor modules to obtain meaningful information from internal and external environmental conditions. The use of smart sensors improves the mobility, adaptability and intelligence of the robot. The human perception system is extremely dexterous in perceiving information from the outside world. However, regarding some special information, sensors are more effective than the human perception system.

2. The basic composition of the manipulator is the manipulator-environment interaction system
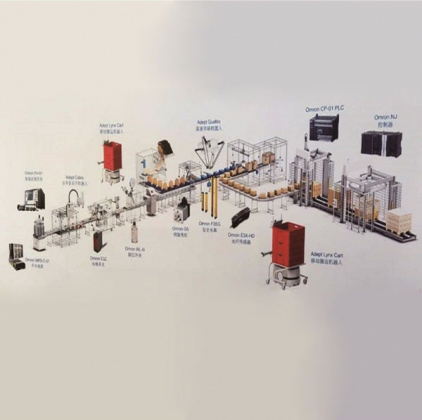
The industrial robot-environment interaction system is a system that completes the interconnection and coordination between the industrial robot and the equipment in the external environment. Industrial robots can be integrated with external equipment into a functional unit, such as a processing and manufacturing unit, a welding unit, and an installation unit. Of course, multiple robots, multiple machine tools or equipment, and multiple parts storage devices can also be integrated into a functional unit that performs complex tasks.