Site Search

Industrial manipulators are widely used in hardware, electronics, plastics, food and other industries. Welding manipulators can improve welding quality, increase productivity and free workers from the harsh working environment. Welding robots can be divided into two categories: arc welding robots and spot welding robots.
Brief introduction of arc welding manipulator:
Arc welding manipulators mainly have two types: melting electrode welding operation and non-melting electrode welding operation. They have the characteristics of long-term welding operation and high productivity, high quality and high stability of welding operation.
Introduction of Spot Welding Manipulator:
The spot welding manipulator performs spot welding operations in accordance with the actions, sequences and parameters specified by the teaching program. The process is fully automated and has an interface for communication with external equipment. Through this interface, it can accept the upper-level master control and management computer. Control commands to work.
Industrial welding manipulator is working in the workshop
1. Five things to pay attention to when choosing a welding manipulator:
(1) Work space The actual work space that the spot welding manipulator can reach is greater than the work space required for welding. The working space required for welding is determined by the location of the solder joints and the number of solder joints.
(2) Spot welding speed and production line speed must match.
Firstly, the single-point working time is determined by the speed of the production line and the number of points to be soldered, and the single-point welding time of the manipulator (including pressurization, energization, maintenance, displacement, etc.) must be less than this value, that is, the spot welding speed should be greater than or equal to the production line speed.
(3) Selection of welding tongs Choose welding tongs according to the shape, type, and position of the weld.
C-shaped welding tongs should be selected for vertical and nearly vertical welding seams, and K-shaped welding tongs should be selected for horizontal and horizontally inclined welding seams.
(4) When multiple manipulators are needed for model selection, it is necessary to study whether to use multiple models and use them together with multi-spot welding machines and simple Cartesian coordinate manipulators. When the manipulator interval is small, attention should be paid to the arrangement of the action sequence, and interference can be avoided by manipulator group control or mutual interlocking.
(5) Other spot welding robots with large memory capacity, complete teaching functions and high control precision should be selected.
Industrial robots for welding applications
After taking the above points into consideration, the demonstration will be carried out from the aspects of economic and social benefits, and then it will be decided to adopt the manipulator and the required number and type.
2. Peripheral equipment for welding manipulator:
It is not enough to use industrial manipulators for welding. It is not enough to have one manipulator. It must be equipped with peripheral equipment.
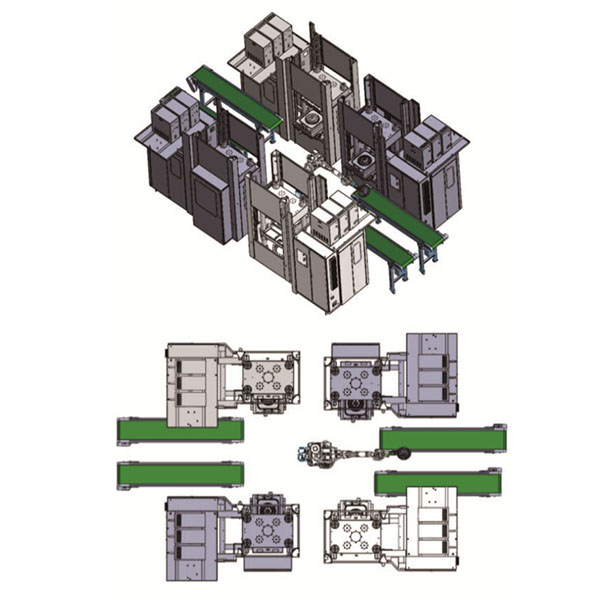
The conventional arc welding manipulator system consists of 5 parts.
Welding robot supporting peripheral equipment
(1) The manipulator body is generally a 6-axis articulated manipulator driven by a servo motor, which consists of a driver, a transmission mechanism, a manipulator, joints, and internal sensors. Its task is to accurately ensure the position, posture and motion trajectory required by the end of the manipulator (the gun).
(2) The manipulator control cabinet, which is the nerve center of the manipulator system, includes computer hardware, software and some special circuits, and is responsible for processing all information and controlling all actions of the manipulator in the working process.
(3) Welding power supply system, including welding power supply, special welding gun, etc.
(4) Welding sensors and system safety protection facilities.
(5) Welding fixtures.





